
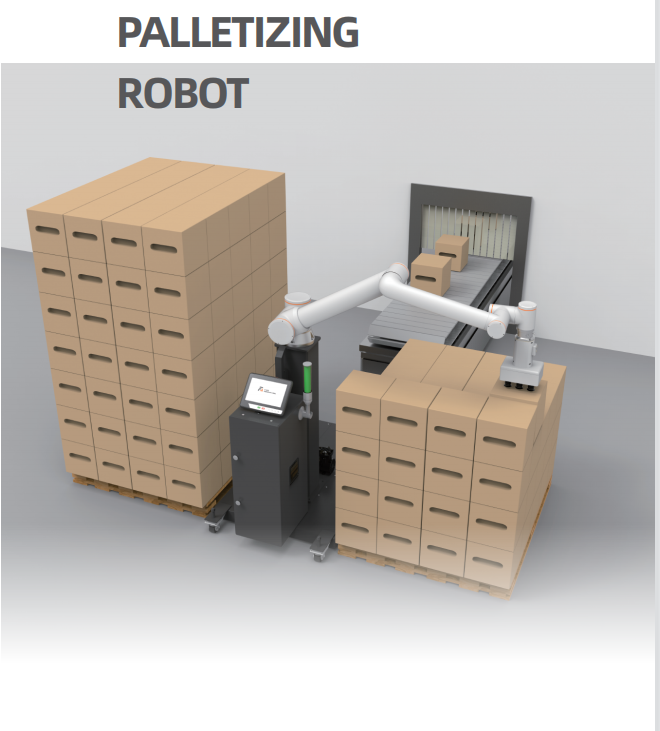
전자동 팔레타이징 로봇


- backpack
- 중국 광둥 포산
- 2024년
- 1000
✓ 센서를 추가할 필요가 없습니다.
✓ 작동이 쉽고 프로그래밍이 간단합니다.
팔레트 잭이나 지게차와 함께 사용할 수 있습니다.
실행 도구 구성 종료:
✓ 표준 진공 홀더
✓ 공통 표준 엔드홀더
✓ 맞춤형 엔드 클램핑 툴링(특수 품목)
전자동 팔레타이징 로봇
✓ 센서를 추가할 필요가 없습니다.
✓ 작동이 쉽고 프로그래밍이 간단합니다.
팔레트 잭이나 지게차와 함께 사용할 수 있습니다.
실행 도구 구성 종료:
✓ 표준 진공 홀더
✓ 공통 표준 엔드홀더
✓ 맞춤형 엔드 클램핑 툴링(특수 품목)



제품 사양:
| 가스 소스 | 0.5-0.8Mpa (진공발생기) |
| 공기 소비량 | 350-450nl/분 |
| 전원 공급 장치 | 220VAC 50Hz ±10% |
| 최대 전력 소비 | 5KW |
| 총 장비 중량 | ≒350kg |
| 상자 크기에 적응 | 사용자 요구 사항을 기반으로 할 수 있음 |
| 스태킹 방식 | 사용자 요구 사항을 기반으로 할 수 있음 |
| 최대 스택 높이* | 들어 올릴 수 있는 최대 적재 높이 낮추어진 높이는 2100mm(팔레트 포함)입니다. 일반적으로 최대 1600mm(팔레트 포함) |
| 최대 팔레트 크기* | 1200mm×1200mm |
| 쌓을 수 있는 상자 크기* | 엘(260-500)mm*W(200-450) |
| 최대 허용 하중 | 20kg |
| 가장 빠른 스택 속도 | 분당 최대 8박스 쌓기 |
| 작업 반경 | 최대 작업 반경 1600mm |
| 보안 기능 | 선택 사항: 안전 격자, 안전 울타리, 안전 유도 카펫 |
| IP 등급 | 로봇 팔은 IP54이고 그리퍼와 기타 액세서리는 IP32를 준수합니다. |
| 상호 작용 | 비상 정지, 안전 보호, 관리자 모드, 공장 설정 모드 등 다양한 안전 입력 및 출력 지원 |
| 보안 기능 | 비상 정지 기능, 외부 안전 인터페이스 예약(I/O 인터페이스를 통해 제어 가능) |
| 표시기 상태 | 정상적으로 전원을 켜면 표시등이 항상 녹색입니다. 전원이 꺼지면 표시등이 꺼집니다. |
간단한 팔레타이징 소프트웨어
쉬운 팔레타이징 소프트웨어를 사용하면 고급 로봇 프로그래밍이 필요하지 않습니다. 사용자는 3가지 주요 정보 세트만 입력하면 됩니다.
판지 상자 크기(예: 너비 x 길이 x 높이) 팔레트 크기: 팔레트 폭, 팔레트 길이, 팔레트 높이, 박스 적재 높이; 컨베이어 크기:
컨베이어 높이, 컨베이어 위치 표시기(컨베이어가 제자리에 있는지 확인하기 위한 팔레타이저의 센서, 스크린
빨간색 또는 녹색 표시등이 표시됨) 이 정보를 사용하여 시스템은 로봇의 움직임을 자동으로 계산하고 지시합니다.
팔레트화된 물체의 크기 범위

길이 1200
폭 1200
높이 2550

팔레타이징 로봇은 특정 순서와 방식으로 제품을 함께 쌓는 데 사용되는 자동화 장비입니다. 이는 일반적으로 산업 생산의 물류, 창고 및 포장 측면에서 사용됩니다. 팔레타이징 로봇을 사용하는 방법은 다음과 같습니다.
1. 자재 준비: 팔레타이징 로봇을 사용하기 전에 자재를 준비해야 합니다. 여기에는 상자 표시와 사양이 요구 사항을 충족하는지 확인하고, 자재가 유효 기간 내에 있는지 확인하고, 건조하고 기름이 없고 먼지가 없는 환경에 보관되어 있는지 확인하는 것이 포함됩니다.
2. 작동 전 검사: 팔레타이징 로봇의 작동을 시작하기 전에 마더 팔레트의 기초가 견고한지, 팔레트가 깨끗하고 기름 얼룩이 없고 마모되지 않았는지 확인해야 합니다.
3. 로봇 켜기: 제조업체에서 제공한 사용 설명서에 따라 팔레타이징 로봇을 켜십시오. 모든 케이블과 전원이 연결되어 있는지 확인하세요.
4. 프로그램 설정: 적재해야 하는 제품 및 팔레트의 크기에 따라 팔레타이징 로봇의 프로그램을 설정합니다. 여기에는 일반적으로 로봇이 잡을 제품의 높이, 너비, 깊이와 같은 매개변수 설정이 포함됩니다.
5. 작업 시작: 제품을 팔레타이징 로봇의 작업 영역에 놓고 시작 버튼을 누릅니다. 팔레타이징 로봇은 자동으로 제품을 집어서 팔레트에 쌓습니다.
6. 모니터링 작업: 팔레타이징 로봇을 작동하는 동안 작업자는 장비 작동을 면밀히 모니터링해야 합니다. 이상이 발견되면 즉시 비상정지 버튼을 누르고 점검 및 수리를 위해 정비담당자에게 연락하세요.
7. 작업 완료: 팔레타이징 로봇이 작업을 완료하면 작업자는 작업 영역에서 팔레트를 제거하고 다음 작업을 준비하기 위해 새 팔레트를 작업 영역에 넣어야 합니다.
8. 로봇 종료: 모든 작업을 완료한 후 사용 설명서의 지침에 따라 팔레타이징 로봇을 종료하고 모든 전원 공급 장치와 연결 와이어가 분리되었는지 확인하십시오.






